
ThirdHand: Giving a Hand to Mobile Devices with a Robotic Arm
Published:
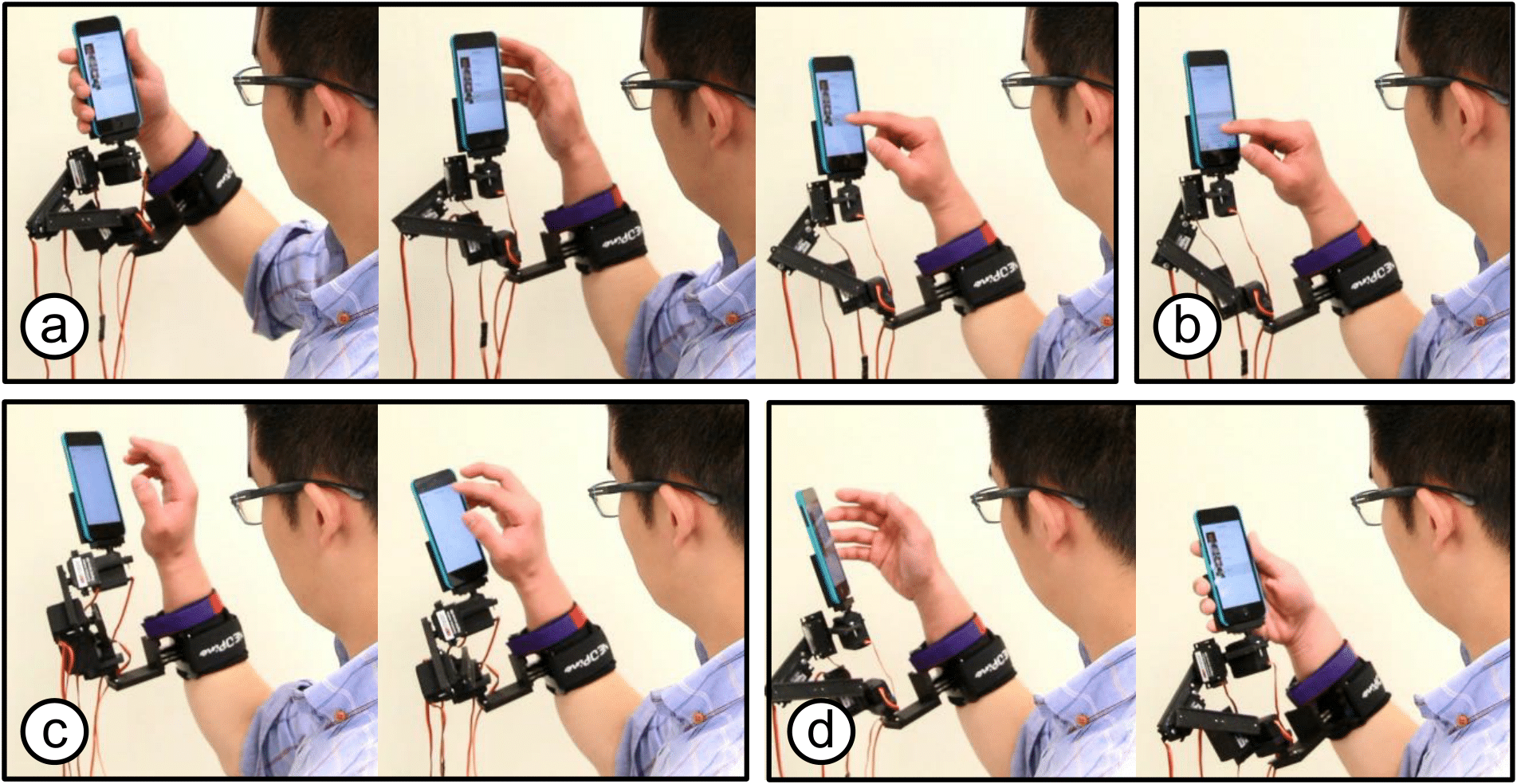
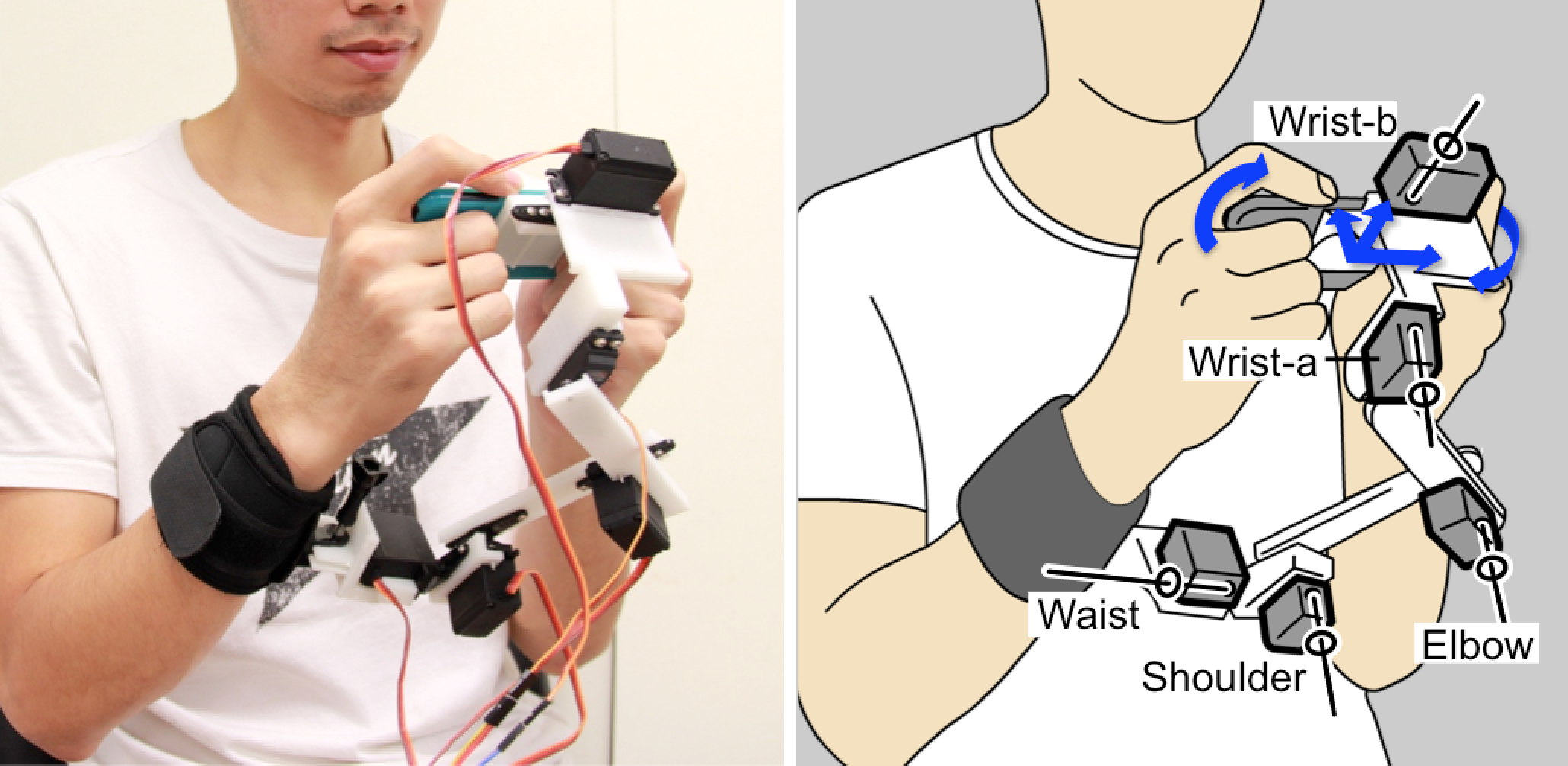
This paper explores the concept of ThirdHand, as a means to inject external force to mobile devices by establishing a physical connection with the devices through a robot arm adding to users’ wrist. With the supporting force, ThirdHand opens up new opportunities for novel single-handed and haptic force interactions on mobile devices. Instead of using their own hands, users can now grip and interact with a mobile device with the help of the robot arm, allowing to reach for far buttons, and perform back-of-device touch and in-air gestural interactions with mobile devices single-handedly.
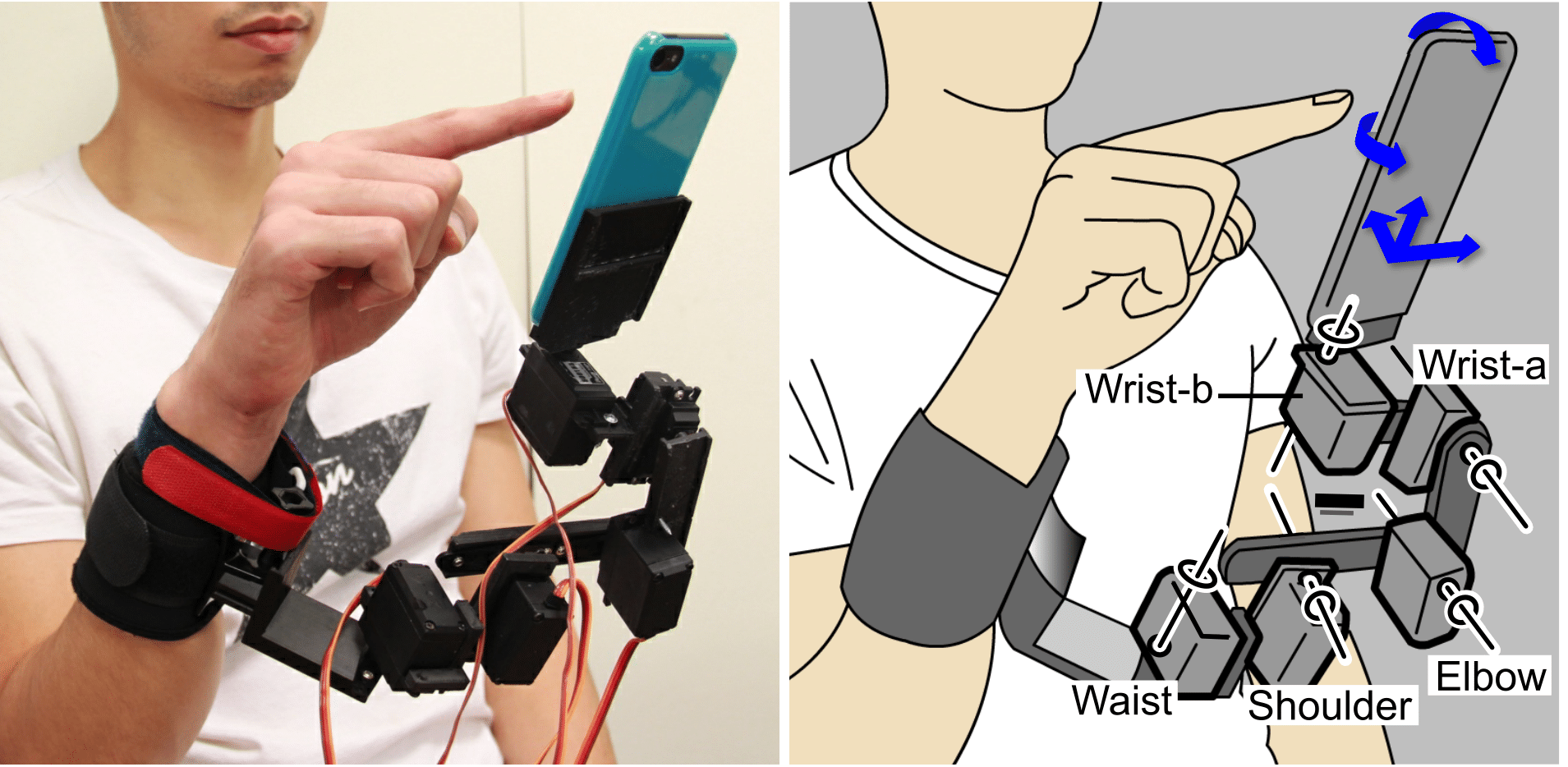
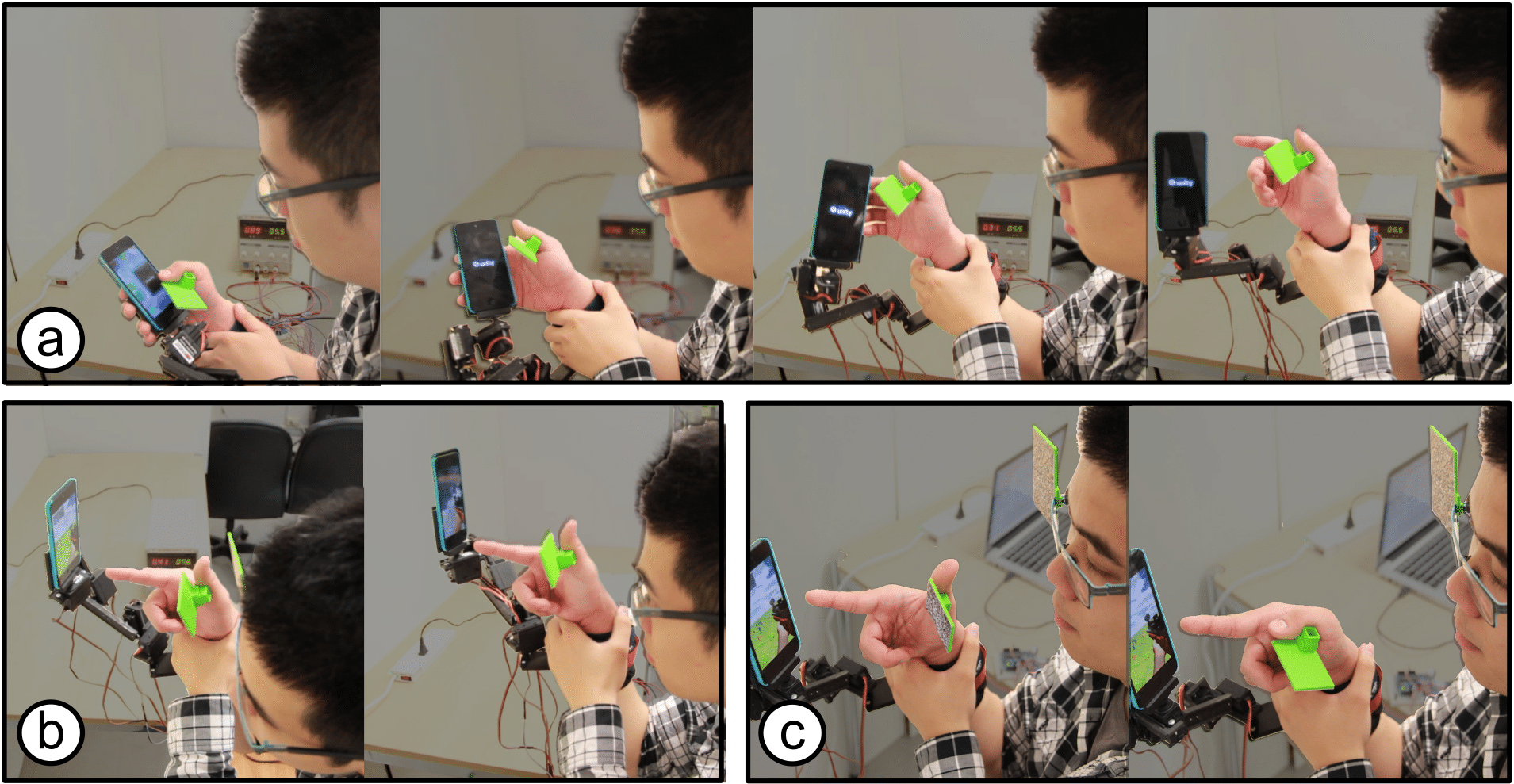
On the other hand, mobile devices such as smartphones become prevalent gaming platforms. To enrich the gaming experiences, researchers are increasingly interested in bringing various haptic feedback to the mobile games. Traditional haptic devices such as phantom 1, a robotic arm that generates force on fingers in precise 6 DOF (Degree Of Freedom), can provide accurate and rich force feedback. However, since the devices need to be grounded on a fixed surface, they are not mobile. Therefore, recent research also explored haptic interaction on mobile devices with self-contain mechanisms. GyroTab [Badshah et al. 2012] demonstrated the potential of ungrounded devices using gyro effect to generate torque feedback. Muscle-propelled force feedback [Lopes and Baudisch 2013] eliminated motors and instead actuating the users muscle for creating feedback. However, these devices provide only 1-DOF force feedback, therefore limit the possible expressions and applications. Hence, this work presents ThirdHand (Figure 1), a wearable robotic arm which provide 5-DOF force feedback to enrich gaming experiences.
Publication:
Siggraph Asia 2015, Emerging Technology // [Paper], [video]
Yi-Chi Liao, Shun-Yao Yang, Rong-Hao Liang, Liwei Chan, Bing-Yu Chen
Recommended Citation:
Pedro Lopes and Patrick Baudisch. (2017). "EMS-Based Actuation and Mechanical Actuation: two sides of the same coin?" CHI 2017 workshop.